赤道儀本体がひとまず完成ということで、次はコントローラの作製に移ります。
以前のエントリで、モーターの動作確認は済んでいますので、同じ回路を実装していく作業です。
私は半田付けが異常に苦手なため、どうなることか、、、
2.材料
arduino uno
Aruduino用ユニバーサル基板
LED付きタクトスイッチ(緑 赤 白2個)
ユニバーサル基板
3.設計と作製
細かいところは恥ずかしくてお見せできないのですが、以下のような構造としました。
できるだけ部品をユニット化して、壊れた時に全体に手を加えないで済むようにしてみました。
第1層 arduino uno
寸法の問題からminiにしたほうがよかったでしょうか。。。

第2層 インターフェイス
基本的には、マイコンとドライバをつなげるための部品です。ジャンパーピンでつないでいた部分の代わりになります。
Aruduino用ユニバーサル基板をそのまま利用しています。

(A)以前のエントリでも書きましたが、接続方法は以下です。ボード上での結線がうまくいかなかったので、結局耐熱電子ワイヤで繋げました。写真のごちゃごちゃしたリード線がそれです。
ドライバ3番(GND)→Arduino GND端子
ドライバ4番(EXT-VDD)→Arduino 3.3V端子
ドライバ5番(SDO)→Arduino 12番端子
ドライバ6番(CK)→Arduino13番端子
ドライバ7番(SDI)→Arduino11番端子
ドライバ8番(#CS)→Arduino10番端子
これはSPI通信のライブラリを使う関係で変えられません。
(B) モーターとの接続インターフェイスもこのボード上に実装しました。
LANケーブルで繋げたいのでモジュラージャックです。
(C)Aruduinoの端子を遊ばせておくのはもったいないので、スピードコントロール用のスイッチをつけることにしました。ピンヘッダで繋げられるようにしています。
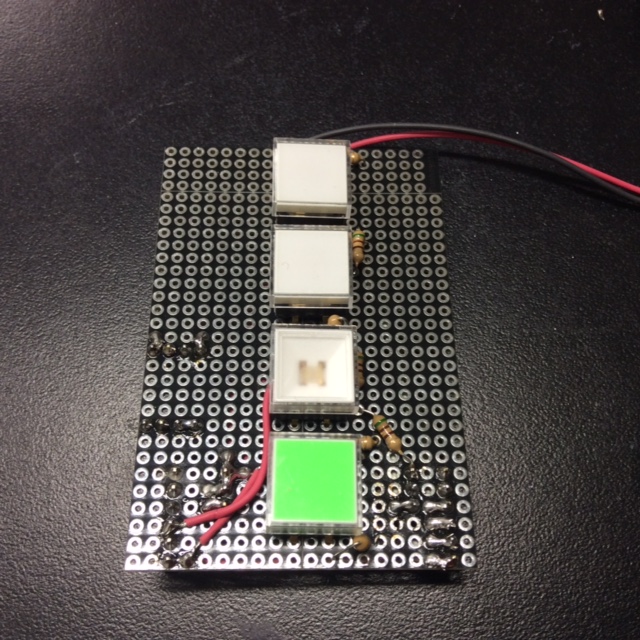
第3層 スイッチ用ボード
ボタン1:恒星追尾モード
ボタン2:100倍速モード(極軸合わせ用)
ボタン3:早送り
ボタン4:巻き戻し
に設定することにしました。
ボタン1,2は一度押せばそのモードで動き続けるように、ボタン3,4は押している間だけ効くようにしたいと思います。せっかくLEDが付いているボタンなので、現在のモードのボタンが光るようにしたいと思います。
それらの設定はプログラム上でするのですが、LEDの結線方法だけはじめに決めておかなければならないのです。
というわけで、概略図はこちら。

これらを合体させます。
まあ、配線とかはもっと工夫ができたと思いますが、とりあえず完成形だけ公開させていただきます。お恥ずかしい。

まずは1層目と2層目をドッキング
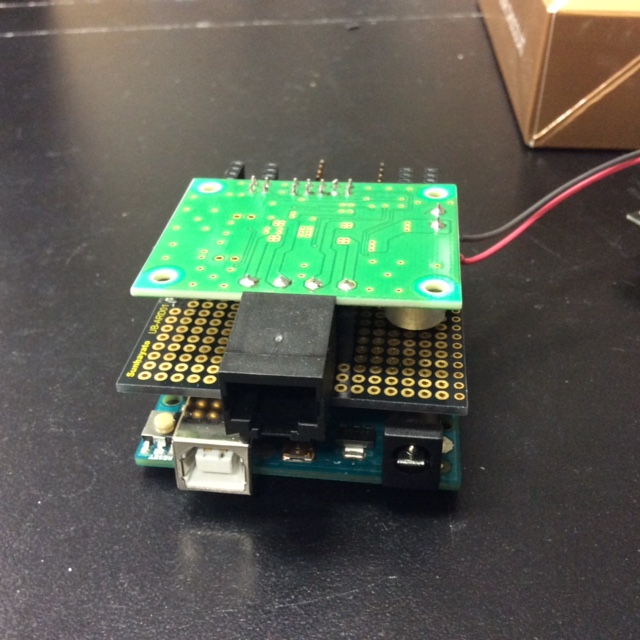
2層目とモータードライバーをドッキング

そして3層目をドッキングしました。
ちなみに

3層目の裏側はこんな感じ。汚くてすみません。電源をここからとっています。
4.最後に
このページ見てもなかなか再現できないということに気がつきましたが、まあ、こんな風に重ねることで省スペースにして見ました。というところだけ主張してみます。
次回はスケッチを!
0 件のコメント:
コメントを投稿